
Love-SAW sensors Technology Note
February 15th 2021: AWSensors is pleased to invite you to take a look to the its new Technology Note on Love-SAW sensors “AWSensors Love-SAW sensors“.
Summary of the Note
Advanced Wave Sensors (AWSensors) develops and markets various types of sensors: classical QCM, High Fundamental Frequency QCM, and Love-Surface Acoustic Wave (Love-SAW). Love-SAW sensors do not measure love, but they do measure other interesting properties of interfacial layers. This Note is dedicated to explaining the basics of the operation of these less known acoustic sensors.
Introduction to Love-SAW sensors
Love waves are shear horizontally (SH) polarized surface acoustic waves. They are named after Augustus Edward Hough Love, who predicted them mathematically in 1911, and appear in fields as distinct as seismology and sensing [1].
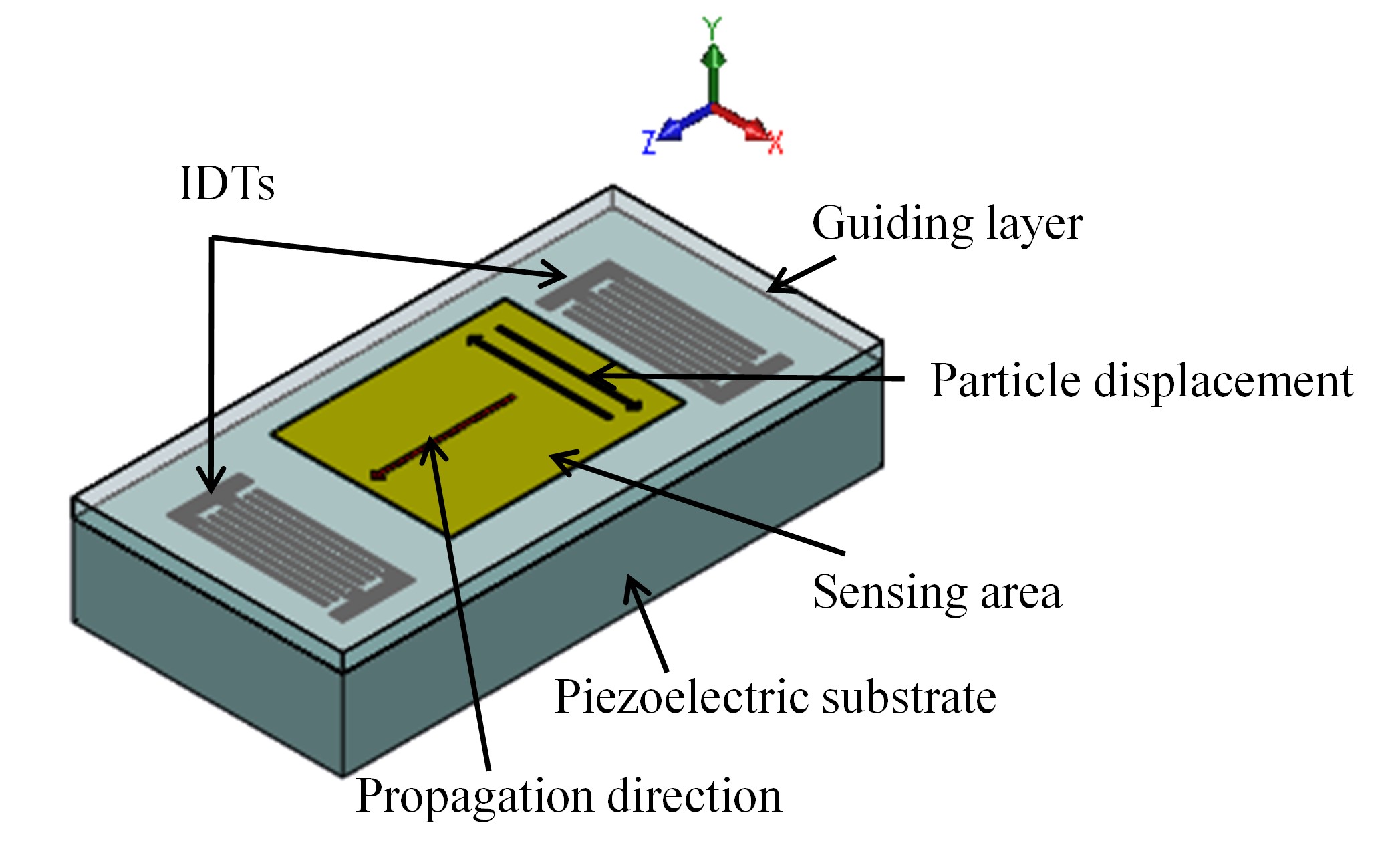
Figure 1. a) Piezoelectric material, such as quartz, cut at a certain angle relative to the crystallographic axis, is used as a substrate in the construction of the Love-SAW sensors which basic structure is shown in b) (Taken from [2]).
Love-SAW sensors use a piezoelectric substrate (like quartz), in which the surface acoustic waves are excited by applying electrical current in a specific direction relative the crystallographic orientation of the piezoelectric material (see Figure 1a). The waves are then confined into the guiding layer overlaying the piezoelectric substrate. The structure of such a sensor is shown in Figure 1b where the current is applied through the so-called interdigitated transducers (IDTs), located between the substrate and the guiding layer. A standing Love wave is generated in the space between the IDTs (D in Figure 2), defining the sensing area. The condition for the existence of these waves is that the shear velocity in the guiding layer is less than that in the substrate. It is this difference in the mechanical properties between the guiding layer and the substrate that slows down the wave propagation velocity and traps the acoustic energy in the guiding layer keeping the wave energy near the surface. The sensitivity of this device is determined by the degree of wave confinement in the guiding layer. Thus, the higher the confinement of the wave in the guiding layer, the higher the sensitivity of the device is.
Love-SAW sensors typically operate at frequencies of hundreds of MHz. The operating frequency of a Love-SAW sensor is defined by the materials of its structure, the periodicity of the IDTs, λ in Figure 2, and the guiding layer thickness, d [2].
Key advantages of Love-SAW devices include efficient operation in liquids, mechanical stability (robustness), and high sensitivity (due to the high operating frequency by only changing the IDTs periodicity). Key limitations include a need for calibration due to the lack of simple, predictive model describing SAW wave propagation akin to the Sauerbrey relationship in QCMD or Lorentz-Lorenz and de Feijter’s relationships in ellipsometry. [3–5]
Continue reading by downloading the full Technology Note (below) …
Download the Full Technology Note
You can download the full Love-SAW Technology Note in pdf format from this link. A list of our Technology Notes can be found on our Technology Web Page.
Other references about Love-SAW sensors
-
Surface Generated Acoustic Wave Biosensors for the Detection of Pathogens: A Review
- Love Wave Immunosensor for the Detection of Carbaryl Pesticide









